- Macchina di prova elettronica universale
- Macchina di prova idraulica universale
-
Macchina di prova di trazione orizzontale
- Macchina di prova per filo
-
Sistema di prova della fatica dinamica
- Tester di fatica servo-idraulico statico e dinamico
- Macchine per prove di fatica servoelettriche
- Fatica elettromagnetica ad alta frequenza
- Macchina per prova di fatica pulsante
- Macchina per prova di fatica a flessione
- Sistema di prova della fatica torsionale
- Macchina di prova per la corrosione da stress
-
Sistema di prova automatizzato per robot
- Serie macchine per prove di impatto
- Macchina di prova di compressione
- Macchina di prova di torsione
- Macchina di prova di flessione
-
Macchina per prova di scorrimento e rottura
-
Prova per coppi erichsen
-
Macchina di prova per cuscinetti elastici
- Macchina di prova a molla
-
Macchina di prova per isolatori
- Metallografia?
- Tester di durezza
- Il microscopio?
-
Tubi di plastica e macchina di prova in gomma
- Tester dell'indice di flusso di fusione
- Tester di temperatura del punto di ammorbidimento HDT&VICAT
- Tester di impatto a pendolo
- Tester di pressione idrostatica
- Tester di rigidità per anello di tubi in plastica
- Calorimetro a scansione differenziale
- Misuratore di umidità
- Tester di densità
- Tester del contenuto di cenere
- Macchina di prova per impatto di massa in caduta
- Tester di immersione al cloruro di metilene
- Tester di resistenza alla fiamma
- Fresatrici
- Attrezzature di prova per l'industria della gomma
- Camera di prova Environmetal
- _Prodotto intellettuale
- Spettrometro ottico
-
Altre apparecchiature di prova
- Apparecchiature di prova per maschere e coperture protettive
- Camera di prova ad alta e bassa temperatura
- Serie di apparecchiature NDT
- Macchina misuratrice della visione
- Proiettore di profilo ottico
- Macchina di misurazione delle coordinate
- Tester di prova di carta e imballaggio
- Tester di prova tessile
- Macchina di prova ottica
- Attrezzatura di prova di bulloni
- Macchina di prova di attrito e usura
- Tester di rottura della tensione
- Reometro di coppia
- Reometro capillare
- Macchina di prova di attrito e usura della plastica
- Accessori per macchine di prova
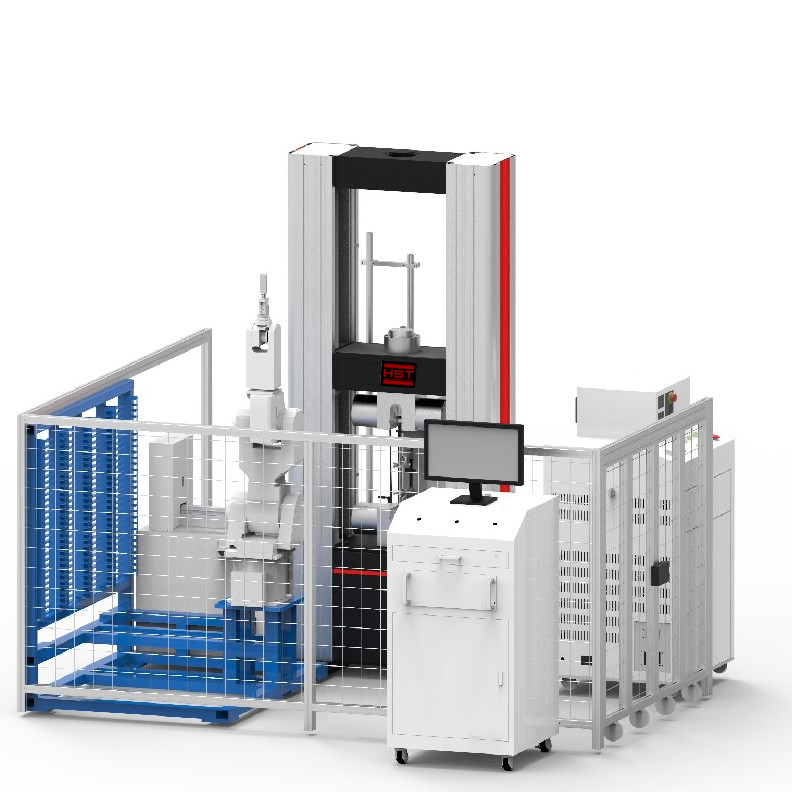
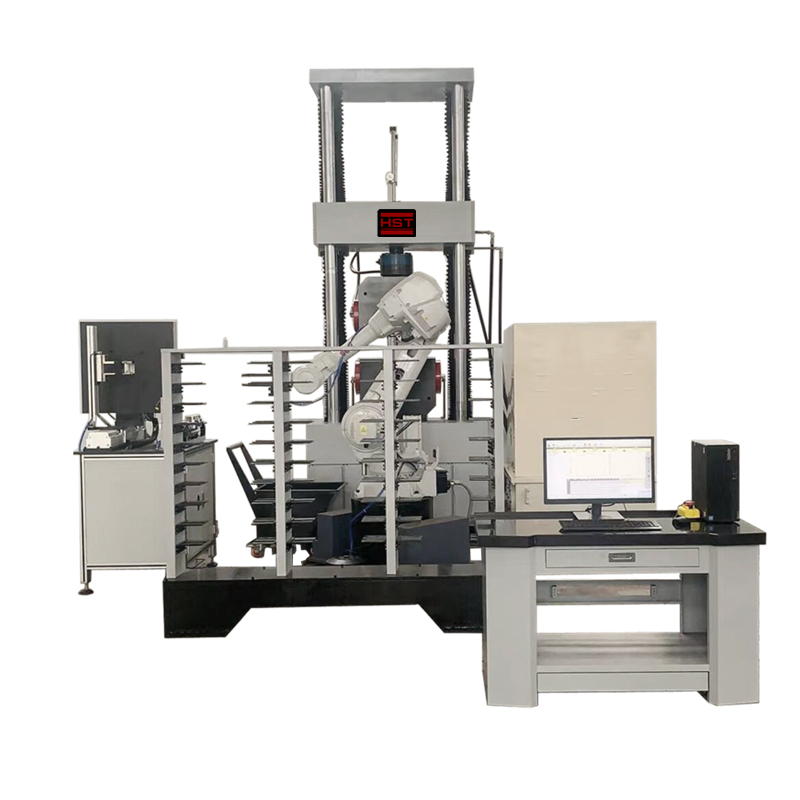
450J 750J Robotico automatico a bassa temperatura Macchina di prova di impatto pendolo
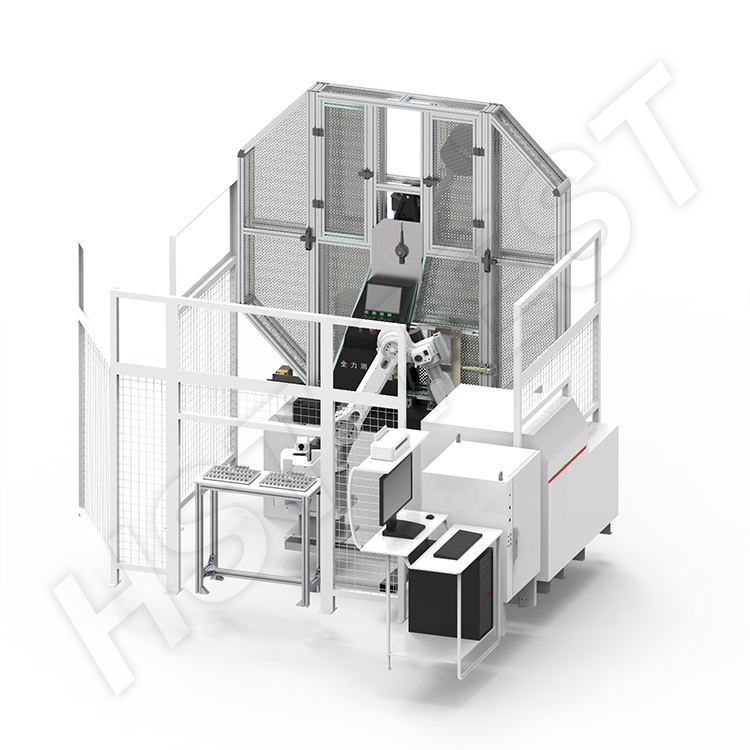

Introduzione
Questa macchina è dotata di un sistema robot per realizzare automaticamente la carica, l'alimentazione e i test di impatto dei campioni.
Caratteristiche
Robot a sei assi collabora con la morsetta campione per raccogliere e trasportare campioni ad alta flessibilità;
Robot è controllato da un sistema visivo. Identificando le caratteristiche di tacca del campione, il robot viene fornito per ottenere una compensazione del movimento per ottenere un posizionamento di tacca con una precisione di 0,1 mm.
Coperchio della camera a bassa temperatura viene automaticamente aperto e chiuso per ottenere l'apertura automatica quando è necessario campionare e la chiusura automatica dopo il completamento del campionamento per garantire l'accuratezza del controllo della temperatura della camera a bassa temperatura;
I campioni vengono collocati mediante l'impilazione di vassoi di campioni e 40 campioni vengono conservati in un singolo vassoio per soddisfare i requisiti di 120 campioni per essere caldi successivamente;
Campione automatico alimentazione con robot per rendere il suo funzionamento più sicuro.
Parametri
2 it > Model | HST450H-AR | HST750H-AR |
Max. Energia d'impatto (J) | 450. | 750. |
Distanza dall'asse del supporto al centro della percussione | 750 mm | |
Quantità del campione | 120. | |
Tempo di alimentazione del campione | ≤ 4 s | |
Precisione di posizionamento (mm) | Meglio di 0,3 | |
Ripetibilità (mm) | ± 0,03 | |
Campione (mm) | 2,5 × 10 × 55 (incudone di cambio) | |
5 × 10 × 55 | ||
7,5 × 10 × 55 | ||
10 × 10 × 55 | ||
Intervallo di temperatura (℃) | 0 ~ -80 | |
Fluttuazione della temperatura (℃) | ± 0,5 | |
Uniformità della temperatura (℃) | ± 1 | |
Peso (kg) | 900 (macchina) +300 (robot) | |
Alimentazione? | 1fase, 220 V ± 10%, 50Hz, 5,5 kW | |
Robot, lunghezza x larghezza x altezza, mm | 2100 × 835 × 1400 | |
Spazio occupato (mm)2.). | 4.5 × 2.8 | |